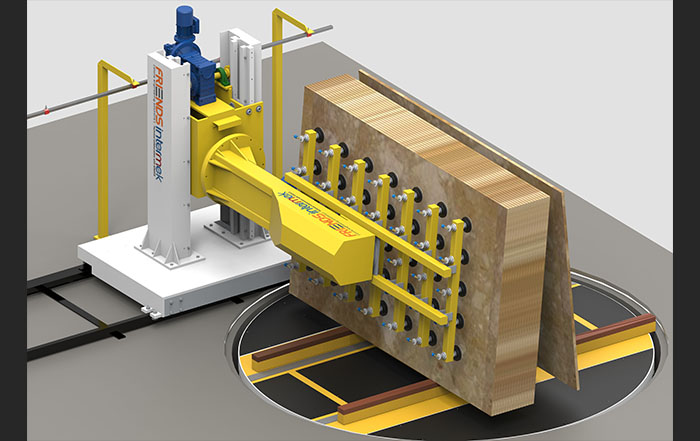
This Robot has been developed in collaboration with Intermek, Greece. The rotating arm type ROBOT can be used for handling slabs in resin line and line polisher with Open Book-Match.
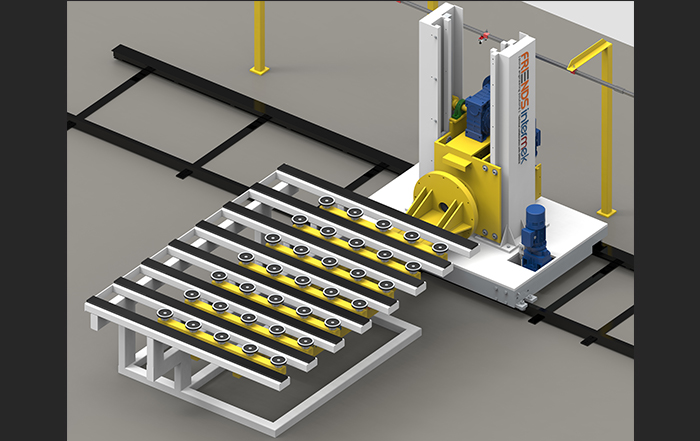
The Robot enables for continuous, uninterrupted loading/unloading of the slabs to the line and can lift marble slabs of dimensions 3.2m x 2.1m x 30mm. The high number of vacuum cups with a high capacity vacuum pump gives robot the ability to handle any type of material. An auxiliary slab platform is provided to perform “open book” type loading/unloading.
The slab is picked up by the robot with the help of suction pads mounted on a tilting arm and the whole structure moves on rails. The robot grabs the slab from the slab stand/trolley and unloads it to the tray directly or turns its upside down by placing it on the auxiliary slab support and picking it up from the bottom side to perform open-book loading. All the axes of the loader are controlled by inverter. The suction cups are separated in groups and they are automatically cut off when the slab is small to keep the suction force high.